Maximum continuous outdoor running speed at 3.3m/s (11.88km/h).
The fastest and most stable small and medium sized quadruped robot on the market. (World Record: 3.7m/s on a treadmill by MIT)
With the potential to be a great jogging companion.
Excellent Motion Stability
Advanced dynamic balancing algorithm enables A1 to quickly reach balance in different situations like impact or fall.
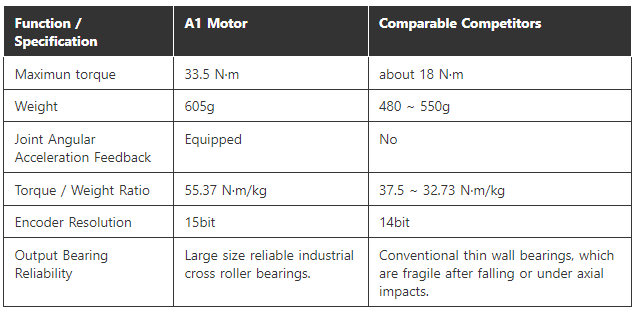
Patented Power System
The ultimate power system brings excellent performance, which is perfect of all kinds of robot competitions.
Crucial for high-speed running.
Patented Body Structure and Layout
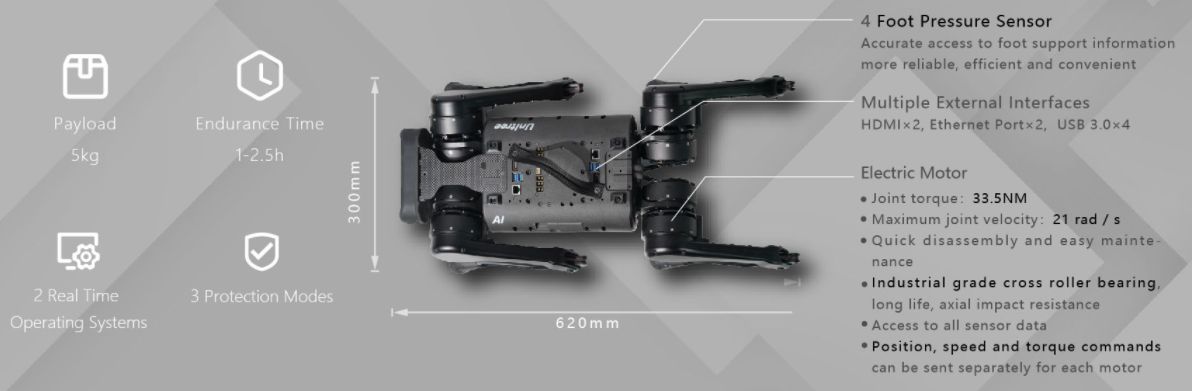
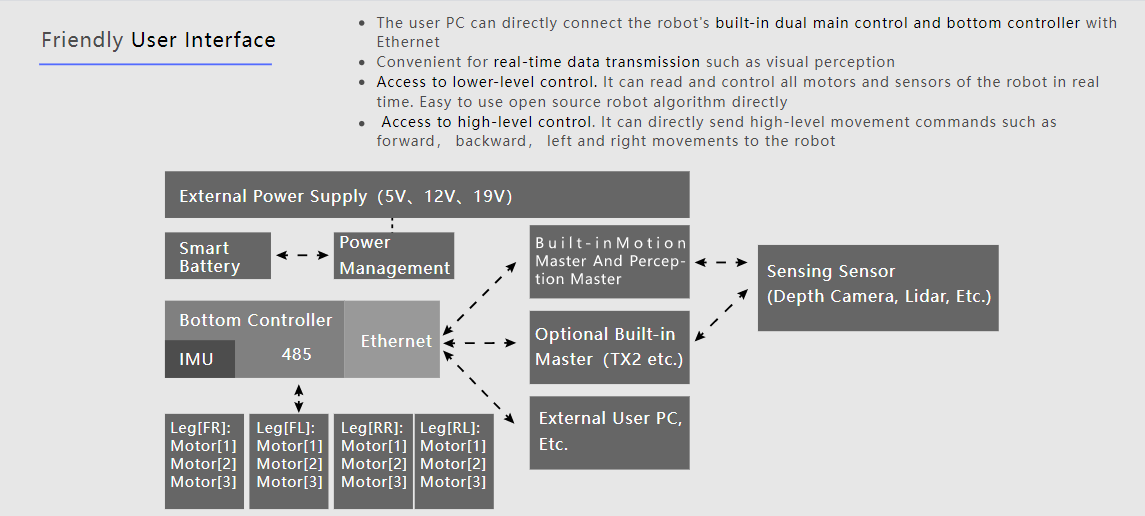
High strength and light body structure. Easy to maintain. 24V external power input. 5V, 12V, 19V power supply. Convenient for additional external equipments.
Equipped with high-performance dual master control (sensing master control and motion master control).
External interface: 4USB, 2HDMI, 2*Ethernet
Master control can be upgraded to TX2.
Standard equipments include RealSense depth cameras.
Capable of map building and obstacle avoidance.
Patented Sensitive foot contact
Integrated force sensor at each foot end. Convenient for robot to obtain realtime contact states of feet under any situations.
More accurate and sensitive than those systems that estimate feet contacts using motor currents.
Integrate foot contact sensor with estimated motor current foot sensor, providing more sensitivity and reliability
Foot end is waterproof and dust-proof, and easy to replace after wear and tear.
Vision-based Autonomous Object Tracking
Realtime tracking of objects within visual range.
Support online machine learning of the target features.
Displaying the confidence of tracking using color box (green → red, 100% → 0%)
Vision-based Autonomous Obstacle Avoidance
Avoid obstacle within 0.8m of the robot's visual range
Capable of detecting the obstacle shapes to adjust the body position
Realtime display of the adjustment of robot body, maximum distance and area within the visual angle, and the range of walking track.
Outstanding Software and Hardware Reliability
More than 6 years in the field of quadruped robot
One A1 robot performed backflip 80 times during CES 2020
Used closed-loop backflip algorithm to ensure motion stability


 More detail about XTS Technologies Sdn Bhd
More detail about XTS Technologies Sdn Bhd
 Malaysia
Malaysia

